Projektbeschreibung
Deutschlandweit gibt es 371 Talsperren, 56 davon in Sachsen. [1] Bei vielen davon kann keine regelmäßige Bauwerksprüfung an den unter Wasser befindlichen Bauteilen erfolgen. Auch viele Brücken und andere wasserbauliche Anlagen, deren Fundamente sich in Gewässern befinden, werden unter der Wasserlinie nur selten geprüft. Eine handnahe Prüfung nach DIN 1076 gilt im Bereich der Bauwerksprüfung als Stand der Technik. Im Fall von Unterwasser-Bauteilen ist für eine vollständige Inspektion des Bauwerks damit ein hoher finanzieller, personeller und logistischer Aufwand verbunden. Eine Alternative wäre das vollständige Ablassen des Wasserkörpers, was einen Versorgungsausfall zur Folge hat und somit nur in Kombination mit größeren Instandsetzungen erfolgt.
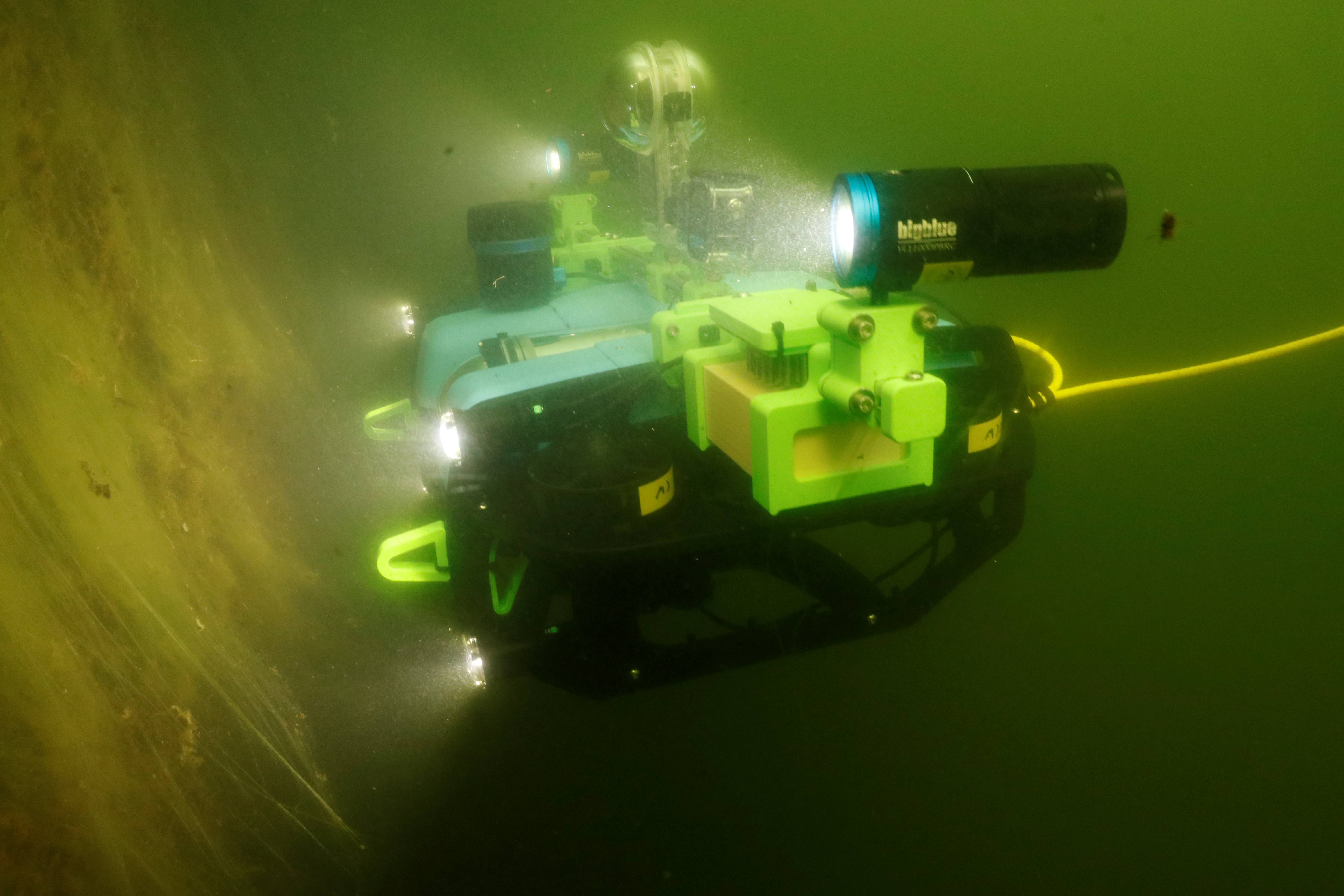
Ziel des Projektes ist die Entwicklung einer kostengünstigen Methode zur wasserseitigen Prüfung von Bauwerken im laufenden Betrieb, um eine regelmäßige, vollständige Inspektion zu erleichtern. Hierfür kommt ein autonomer Tauchroboter (AUV) zum Einsatz, der die Bauwerke optisch erfasst und eine automatisierte Erkennung potenzieller Schadstellen ermöglicht. Ergänzend übernehmen wissenschaftliche Taucher die Überprüfung dieser erkannten Schadstellen, um eine präzise Bewertung vorzunehmen. Die gewonnenen Erkenntnisse fließen in einen Leitfaden zur systematischen Bauwerksprüfung unterhalb der Wasserlinie ein.
Aktuelles aus dem Projekt
Erste Einsätze an der Talsperre: KI-gestützte Unterwasserinspektion im Praxistest
Ein wichtiger Meilenstein im Forschungsprojekt SUBmarIne wurde erreicht: Bei ersten Einsätzen an einer Talsperre konnte das entwickelte System erstmals unter realen Bedingungen erprobt werden. Zum Einsatz kamen sowohl der Unterwasserroboter mit Sensormodul als auch begleitende wissenschaftliche Taucher, um hochauflösende Bilddaten der Bauwerksoberflächen unter Wasser aufzunehmen.
weiterlesen
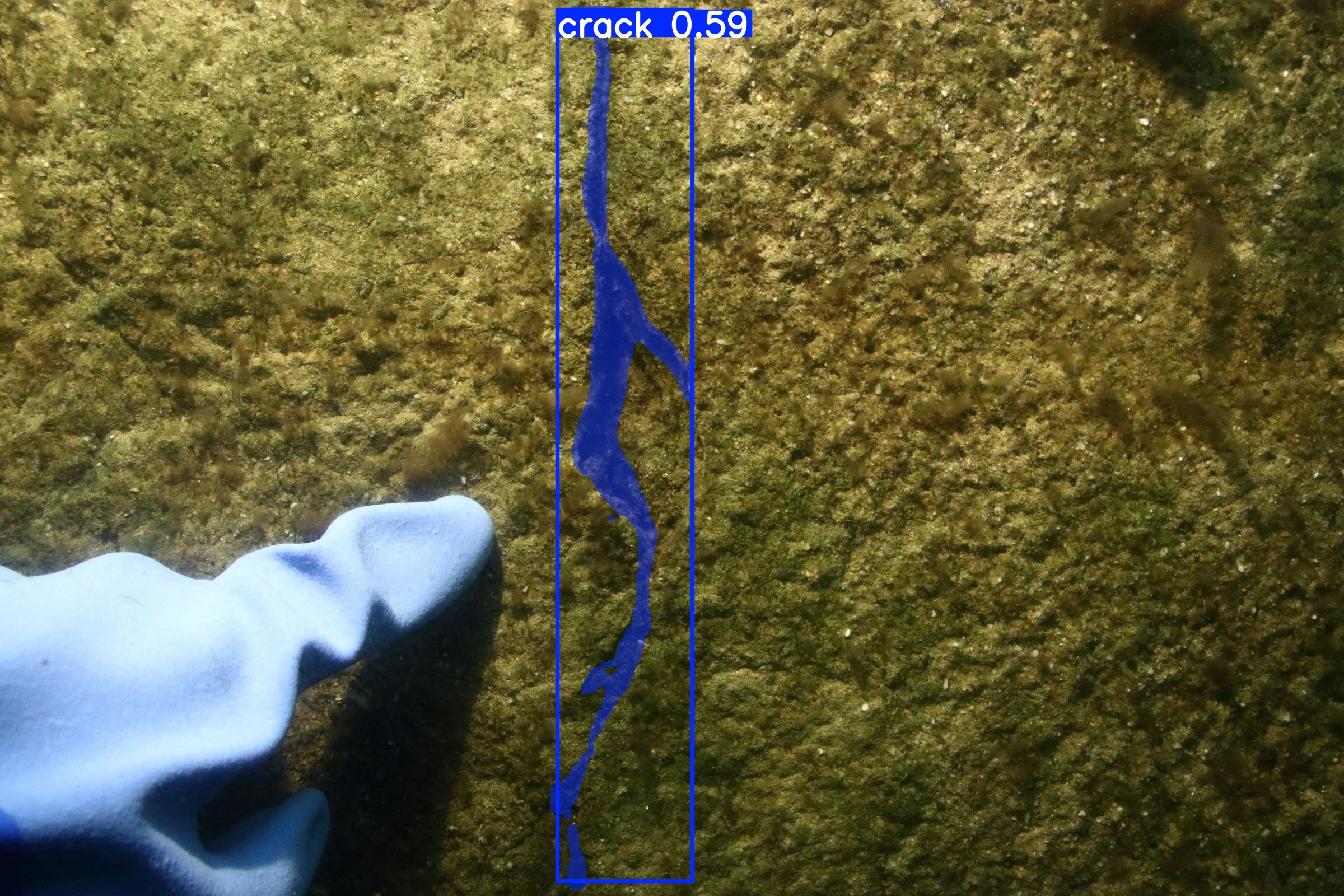
Ein besonderer Fokus des Projekts liegt auf der Entwicklung einer künstlichen Intelligenz, die diese Bilddaten automatisiert auswerten und potenzielle Schadstellen wie Risse, Abplatzungen oder andere Auffälligkeiten erkennen kann. Ziel ist es, Unterwasserinspektionen langfristig effizienter, objektiver und häufiger durchführen zu können – insbesondere an sicherheitsrelevanten Bauwerken wie Talsperren.
Die Einsätze lieferten wertvolle Daten und Erkenntnisse für die Weiterentwicklung der Sensorik, Datenerfassung und KI-gestützten Auswertung. Gleichzeitig entstanden bei den Arbeiten neue Film- und Bildaufnahmen für die Präsentation des Projekts auf der IFAT-Messe. Dazu gehören unter anderem ein VR-Projektvideo zum virtuellen Miterleben eines Taucheinsatzes.


Forschung im Einsatz: SUBmarIne präsentiert Ergebnisse von 2025
Im Rahmen der Jahreshauptversammlung 2026 des Scientific Diving Centers wurde das Forschungsprojekt SUBmarIne einem breiten Fachpublikum vorgestellt. Im Mittelpunkt standen dabei die zugrunde liegende Problemrelevanz bei der Inspektion von Unterwasserbauwerken und die daraus abgeleiteten Projektziele.
weiterlesen
Ein zentrales Thema der Präsentation war dabei die Vorstellung erster Forschungsergebnisse aus dem Jahr 2025. Unter anderem wurden die Möglichkeiten der photogrammetrischen 3D-Modellerstellung von Unterwasserbauwerken sowie der automatisierten Schadstellendetektion vorgestellt. Diese Verfahren wurden während der Exkursion 2025 nach Sveta Marina in Istrien (Kroatien) intensiv erprobt und weiterentwickelt. Die dort gewonnenen Erkenntnisse zeigten das hohe Potenzial der eingesetzten Methoden für eine präzise und effiziente Bauwerksinspektion.
Die vorgestellten Ergebnisse und Projektfortschritte stießen auf großes Interesse und bildeten die Grundlage für einen intensiven fachlichen Austausch. Gleichzeitig wurde deutlich, welches Potenzial SUBmarIne für die Weiterentwicklung moderner, automatisierter Inspektionsverfahren im Bereich der Unterwasserinfrastruktur besitzt.




Forschungsprojekt „SUBmarIne“ gestartet – Auftakt in Karlsruhe
Mit dem Forschungsprojekt Submarine ist ein weiteres zukunftsweisendes Vorhaben im Rahmenprogramm „Wasser der Zukunft“ des Bundesministeriums für Forschung, Technologie und Raumfahrt (BMFTR) offiziell gestartet. Ziel des Programms ist es, innovative Lösungen für den nachhaltigen Umgang mit der Ressource Wasser zu entwickeln und den Wissenstransfer zwischen Wissenschaft, Wirtschaft und Gesellschaft zu fördern.
weiterlesen
Zum offiziellen Start lud der Projektträger Karlsruhe (PTKA) nach Karlsruhe ein. Zahlreiche Vertreterinnen und Vertreter aus Forschungseinrichtungen, Unternehmen und Förderinstitutionen nutzten die Gelegenheit, sich über die geplanten Arbeiten auszutauschen und erste Kooperationen zu vertiefen.
Das abwechslungsreiche Programm bot eine Reihe spannender Vorträge: Wissenschaftliche Partner und Industrievertreter stellten ihre Projekte und Ansätze vor und zeigten eindrucksvoll, wie breit das Spektrum der geförderten Forschung im Rahmenprogramm ist – von technologischen Innovationen über praxisorientierte Anwendungen bis hin zu strategischen Konzepten für den nachhaltigen Schutz unserer Wasserressourcen.
Neben den Fachvorträgen stand vor allem der persönliche Austausch im Mittelpunkt. In Gesprächen und Diskussionsrunden wurden fachliche Synergien erkannt, Ideen weiterentwickelt und neue Kontakte geknüpft. Die Veranstaltung legte damit einen wichtigen Grundstein für die enge Zusammenarbeit aller Projektpartner im weiteren Verlauf.
Mit Submarine wird ein bedeutender Beitrag zu den Zielen des Rahmenprogramms „Wasser der Zukunft“ geleistet. In den kommenden Monaten und Jahren werden die beteiligten Partner gemeinsam daran arbeiten, neue Ansätze für ein nachhaltiges Wasserressourcenmanagement zu entwickeln – sowohl in der Forschung als auch in der praktischen Umsetzung.


Projektpartner und Aufgabenbereiche
Scientific Diving Center Freiberg
- Aufbau des Sensormoduls mit Stereokamerasystem, Unterwasserbeleuchtung und Linienlaser
- Erstellung von Prüfkörpern mit simulierten Schadstellen zur Validierung, Genauigkeitsuntersuchung und Erkennung von Einsatzgrenzen des Systems
- Integration des Sensormoduls an den Tauchcomputer
- Konstruktion der Kabelführung für das AUV
- Auswertung der Bilder mittels Photogrammetrie
- Untersuchung an einem Pilotbauwerk
- Öffentlichkeitsarbeit

Institut für Informatik der TU Freiberg
- Inbetriebnahme des Tauchroboters
- Aufbau und Inbetriebnahme der Landstation
- Integration des Sensormoduls an den Tauchroboter
- Positionsbestimmung und Pfadplanung des Tauchroboters
- Optimierung der Aufnahmeparameter
- Auswertung der Laserprojektionsaufnahmen
- Untersuchung an einem Pilotbauwerk
- Öffentlichkeitsarbeit
GeoWiD
- Erfassung des Ist-Zustands eines Referenzobjektes
- Validierung der verschiedenen Nutzungsarten
- Untersuchung an einem Pilotbauwerk
- Erprobung des finalen Einsatzablaufs
- Überprüfung / Bewertung der Sensordetektion
- Öffentlichkeitsarbeit
Assoziierte Partner
Landestalsperrenverwaltung des Freistaates Sachsen
- dient als Schnittstelle zu den Anwendern
- garantiert Zugang zu Staumauern
- stellt Referenz- und Schadensdaten von durchgeführten Untersuchungen zur Verfügung
DEKRA
- Prüfstelle für Bauwerke (über und unter Wasser)
- Sicherheits- und Risikobewertung gemäß geltenden Normen
- Einschätzung potentieller Gefahren und Empfehlung für Instandsetzungsmaßnahmen
Milan Geoservices GmbH
- Erstellung von Höhen- und Geländemodellen
- Vermessung zu Wasser mittels Hydroakustik und Tiefenlotung
- externe Expertise für das Gesamtprojekt
- Ratschläge über Funktionalität und Handhabung zur praxisgerechten Anwendung des Endprodukts


Ansprechpartner



